mschwett
Well-Known Member
- Region
- USA
there has been a lot of confusion about this, rightfully so since specialized's language is not clear. the current language around the SL motor on the creo states "the smooth 240 watt SL 1.1. motor doubles your effort..." and then states "rider amplification: 2x you."
the mission control documentation says "The Support level defines the proportion of motor assist against your own pedaling input," and about peak power, says "This feature refers to the power output by the motor for each Support Mode. ... If Peak Power is set at less than 100%, you'll limit the amount of power that the motor delivers and this will create an artificial ceiling that cannot be compensated for with leg power."
i originally believed (many posts here and elsewhere state!) that the support level was a simple percentage of your output - rider does 300w, support is at 50%, motor does 150w. as pointed out by @Stefan Mikes, not so. in fact, it's 50% of the maximum "2x" amplification factor for the motor. if the rider was doing 100w, and the support level was set to 100%, the motor would add 100% of 2X the rider power (aka 2x), which would mean a motor OUTPUT of 200w. the motor is not 100% efficient, so the input would be around 240w. if the rider was doing 200w, and the support level was set to 40%, the motor would add 40% of the 2x of the rider power (aka .8x), which would mean a motor output of 160w, and a motor input of approximately 200w.
the maximum motor output is 240w, and the maximum motor input (the figure displayed by mission control) is 300w. specialized has stated that for the SL motors, the peak and sustained power are basically the same.
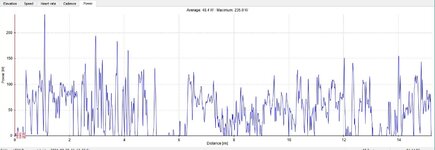
i experimented today with a wide range of mission control settings to confirm this, and it's pretty much correct, although there's one big caveat - the motor power is surely in large part determined by the torque sensor, and we really have no way of knowing torque without backing out cadence and power, introducing a lot of error into the equation. we're making our comparison based on the creo's firmware having already converted the torque * cadence value into a power estimate, and there definitely seems to be a bit of lag, a bit of smoothing, and probably all kinds of other mathematical wizardry going on. the data i got (1 second sampling of rider and motor power) is a bit spiky, and there are some clear anomalies introduced by rapid changes of cadence, speed, etc. nonetheless, it pretty much works the way i've described above.
this chart shows motor power in blue, rider power in red, and a smoothed "support percentage" value in orange. the mission control setting is above. for this experiment, i set the max at 100% so the only determinant here is how much work the rider is doing, up to the motor's maximum power. at a mission control value of 10% assist, the actual motor output (assuming the 80% efficiency we mention above!) is 20.46%. it's fairly smooth, but at this low setting not particularly reactive to big increases in rider power, as you can see where i pedaled up to 300w and the assist... stayed the same. at the mission control value of 20% assist, the average support level is 43%. i pedal with 250w, motor outputs 108w. you can see things are drifting up a bit - at 25% assist, the average actual output is almost 55%, and at 30% it's 65.5%. this pretty clearly proves that the mission control "support" value is not the percentage of 100% rider power, it's actually the percentage of 200% rider power (2x you... but really, it's 3x you") ) incidentally, this is all confirmed by a specialized rep directly at emtbforums - https://www.emtbforums.com/communit...r-in-mission-control-app-v2-0.4038/post-56053
) incidentally, this is all confirmed by a specialized rep directly at emtbforums - https://www.emtbforums.com/communit...r-in-mission-control-app-v2-0.4038/post-56053

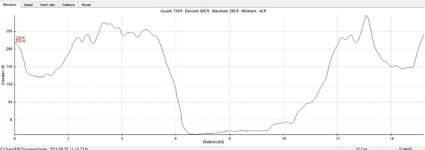
having pretty much found the assist percentage behaving as expected, i did another experiment, the other way around. 100% assist (so it's going to always try and be "2x me" plus the original me) but stepping the max support from 10 to 90 in 10% increments. this behaves exactly as expected, with some spikes in the data and the big caveat that it seems around 10% ahead of itself - at 40% max power, it's actually at 50%, at 90, it's pretty much at 100, etc.
gold line is percent of maximum possible motor output (240w, 300w battery draw), thick blue line is battery draw in watts. dashed red line is rider power, not very relevant here since we're at 100% assist level and i'm basically always pedaling hard enough to make the determining factor the "max" power.

there is one final thing i need to explore a bit. when i set eco to 10% assist and 10% max, i got ... zero motor output regardless of speed or rider power. not sure what that's about. will have to experiment a bit more.
the mission control documentation says "The Support level defines the proportion of motor assist against your own pedaling input," and about peak power, says "This feature refers to the power output by the motor for each Support Mode. ... If Peak Power is set at less than 100%, you'll limit the amount of power that the motor delivers and this will create an artificial ceiling that cannot be compensated for with leg power."
i originally believed (many posts here and elsewhere state!) that the support level was a simple percentage of your output - rider does 300w, support is at 50%, motor does 150w. as pointed out by @Stefan Mikes, not so. in fact, it's 50% of the maximum "2x" amplification factor for the motor. if the rider was doing 100w, and the support level was set to 100%, the motor would add 100% of 2X the rider power (aka 2x), which would mean a motor OUTPUT of 200w. the motor is not 100% efficient, so the input would be around 240w. if the rider was doing 200w, and the support level was set to 40%, the motor would add 40% of the 2x of the rider power (aka .8x), which would mean a motor output of 160w, and a motor input of approximately 200w.
the maximum motor output is 240w, and the maximum motor input (the figure displayed by mission control) is 300w. specialized has stated that for the SL motors, the peak and sustained power are basically the same.
i experimented today with a wide range of mission control settings to confirm this, and it's pretty much correct, although there's one big caveat - the motor power is surely in large part determined by the torque sensor, and we really have no way of knowing torque without backing out cadence and power, introducing a lot of error into the equation. we're making our comparison based on the creo's firmware having already converted the torque * cadence value into a power estimate, and there definitely seems to be a bit of lag, a bit of smoothing, and probably all kinds of other mathematical wizardry going on. the data i got (1 second sampling of rider and motor power) is a bit spiky, and there are some clear anomalies introduced by rapid changes of cadence, speed, etc. nonetheless, it pretty much works the way i've described above.
this chart shows motor power in blue, rider power in red, and a smoothed "support percentage" value in orange. the mission control setting is above. for this experiment, i set the max at 100% so the only determinant here is how much work the rider is doing, up to the motor's maximum power. at a mission control value of 10% assist, the actual motor output (assuming the 80% efficiency we mention above!) is 20.46%. it's fairly smooth, but at this low setting not particularly reactive to big increases in rider power, as you can see where i pedaled up to 300w and the assist... stayed the same. at the mission control value of 20% assist, the average support level is 43%. i pedal with 250w, motor outputs 108w. you can see things are drifting up a bit - at 25% assist, the average actual output is almost 55%, and at 30% it's 65.5%. this pretty clearly proves that the mission control "support" value is not the percentage of 100% rider power, it's actually the percentage of 200% rider power (2x you... but really, it's 3x you
) incidentally, this is all confirmed by a specialized rep directly at emtbforums - https://www.emtbforums.com/communit...r-in-mission-control-app-v2-0.4038/post-56053having pretty much found the assist percentage behaving as expected, i did another experiment, the other way around. 100% assist (so it's going to always try and be "2x me" plus the original me) but stepping the max support from 10 to 90 in 10% increments. this behaves exactly as expected, with some spikes in the data and the big caveat that it seems around 10% ahead of itself - at 40% max power, it's actually at 50%, at 90, it's pretty much at 100, etc.
gold line is percent of maximum possible motor output (240w, 300w battery draw), thick blue line is battery draw in watts. dashed red line is rider power, not very relevant here since we're at 100% assist level and i'm basically always pedaling hard enough to make the determining factor the "max" power.
there is one final thing i need to explore a bit. when i set eco to 10% assist and 10% max, i got ... zero motor output regardless of speed or rider power. not sure what that's about. will have to experiment a bit more.
Last edited: