sorry to be bringing up an old thread but i wanted to share my experiences with these settings just in case anyone else comes here looking for more info (like i did). i have a longtail cargo bike i just finished building, with a Nexus 8 internal hub. my main goals for programming are similar to
@khuuhkrr, meaning i don't mind breaking a sweat and i'm not trying to go insanely fast. the difference is that i am using a cargo bike in the Netherlands, so everything is on flat roads with no hills or dirt. my biggest priority is mainly longevity of the hub gears, i want to keep as little power going through it as i can in order to hopefully extend it's life. the Nexus 8 is strong compared to the other models in the line but with cargo weight + mid drive torque it's experiencing some trauma i'm afraid it was probably not designed for.
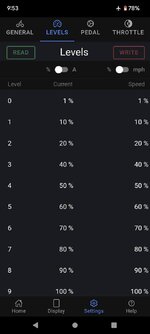
when i first built the bike i was using what i believe is sort of the "kepler" programming approach as shown in
this guide and discussed in
this thread on endless sphere, which is speed at 100% on every level and the power incrementing by 10 through 9 levels of PAS. like this:
top speed = 70km/h
max current = 18A
start current = 5%
keep current = 60%
slow start mode = 4
startup degree = 4
current decay = 8
time of stop = 250ms
stop decay = 0ms
current limit | speed limit
10%|100%
20%|100%
30%|100%
40%|100%
50%|100%
60%|100%
70%|100%
80%|100%
90%|100%
100%|100%
i use an eggrider which records the data for my rides, and when using these settings i was getting cruising power of 580W, with peaks staying below 700W and a max speed of 33km/h. i felt like i was controlling my speed using the hub gears just like i do on my non electric bike, but then i used the PAS levels to decide how much extra sauce the motor gives. it wasn't the smoothest ride however, particularly when starting from a dead stop, which is what lead me here.
i tweaked the settings to incorporate the speed values as OP made a convincing point about their usage, so the speed limit goes up in increments of 5 between 55-100%, alongside the increments of 10 on the current limit. the top speed was reduced to 40km/h. everything else is basically the same except the stop decay which got moved to 1000ms. the changes look like:
top speed = 40km/h
max current = 18A
start current = 10%
keep current = 60%
slow start mode = 3
startup degree = 4
current decay = 8
time of stop = 250ms
stop decay = 1000ms
current limit | speed limit
10%|55%
20%|60%
30%|65%
40%|70%
50%|75%
60%|80%
70%|85%
80%|90%
90%|95%
100%|100%
when biking the same route through the neighborhood i am now getting cruising power of 640W with peaks up to 750W. the kicker is my max speed was 6km/h slower (27km/h).
i am a bit confused as to why it was working so much harder. the starting and stopping felt smoother but once i got up to speed it felt like the motor continued to put too much power out, which is what i wanted to avoid.
i'm guessing this has to do with the speed limit being related to the rpm of the motor. when i ride, i try to keep my cadence as high as i comfortably can. i make full use of gears 1 through 5 to get me from a dead stop to cruising speed, and then the top 3 gears are mostly reserved for long stretches of flat road where i can really get moving.
i think because i tend to pedal with a really high cadence even in lower gears, i had to put the bike into a higher PAS than i was used to so that the power wouldn't completely trail off. for example in my old configuration i would never dare to go above 50-60% current limit (PAS 4 and 5) when riding with no cargo because the bike would try to run away from me, whereas with these new settings i was definitely giving it 80-90% (PAS 7 and 8) just to get going the same speed.
i ended up landing on a configuration that was kind of in between the two, like this:
top speed = 70km/h
max current = 18A
start current = 10%
keep current = 60%
slow start mode = 2
startup degree = 4
current decay = 8
time of stop = 250ms
stop decay = 1000ms
current limit | speed limit
10%|100%
15%|100%
20%|100%
30%|100%
40%|100%
50%|100%
60%|100%
75%|100%
85%|100%
100%|100%
this gives me the power i need when i need it, and allows me to more comfortably use my full range of gears which is super important when carrying passengers or cargo. it also helps to keep me from getting knocked off balance when i am coming from a dead stop in a low gear. i am now keeping my average power at around 500W even with a passenger on board going 25-30km/h.
i think khuuhkrr has a really smart approach and it was an enjoyable read, it probably didn't work for me because i have a big heavy cargo bike and they are using a more nimble mountain bike.
(also there are no settings for throttle because i don't use one, why would you lol)






 ) as most feel this is wrongly tied to Stop Delay
) as most feel this is wrongly tied to Stop Delay