Bella-Motor-HP
Member
- Region
- USA
Alrighty, here we go again. More and more of my parts are showing up so I keep shifting gears a bit.
Eventually I will get the Stock Bafang Control Working with the Eggrider. I planned to use this VESC in the end so rather than wasting more time on the stock controller that I only want working for testing I am moving on to this. Don't worry I will finish the other thread.
Ok so VESC is a type of BLDC Controller that has OPEN SOURCE software meaning we can tune program modify each and every last function that the circuit is capable of.
With this power comes risk, remember that, this VESC can put out enough power to fry your motor in seconds and probably could fry your battery too if you don't have a BMS in your battery.
Most importantly start out with low AMP settings and everything at low power. Test it, monitor the motor temp the Vesc temp and the battery temp. As long as nothing is getting too hot increase the power a little at a time until things start to get hot. Don't let it overheat though. I wouldn't go over 100c to 120c. Once you find that power level where things are getting hotter than you want, back it off maybe 10%. Call that your max safe power. Everyone has a different setup so this will be different for everyone. So Just don't copy someone Elses settings. Things like the size and length of the phase wires changes things.
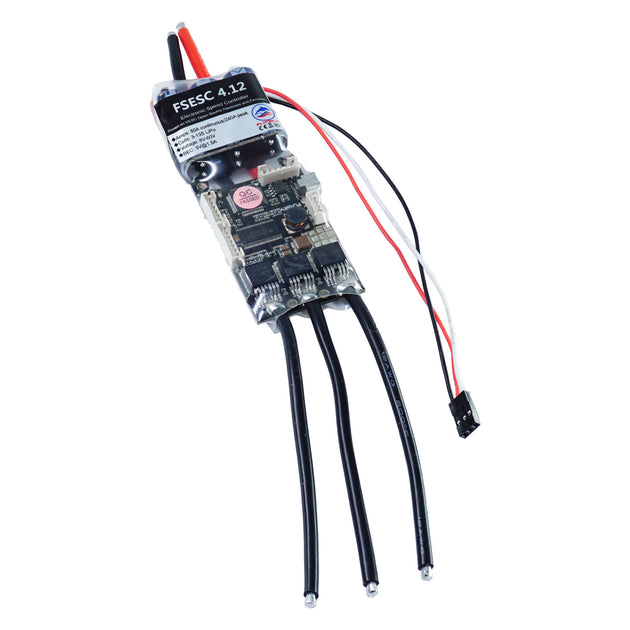
This is the VESC I bought.
https://tronicsystems.com/products/tronic-250r-bare-board-no-enclosure

The cable headers are 2mm JST Connectors.
So it's easy to make the wiring harness. I plan to take any 1T4 EB Bus Cable and put the JST Connectors on the end that connects to the motor.
Just have to cut the end off and attach the JST Connectors.
For a Display I am pretty sure the EggRider will work. There are settings for VESC Protocol in the EggRider.
But really you don't have to have a display with this if you don't need one.
The Board is Bluetooth so it connects to a app and shows more data than I have seen on any other display.
Check it out.


Mann I am excited !!
It's gonna take a little bit to get it all going but I can't wait.
YeeeeeeHawwwww
LINKS !!
VESC WEBSITE
 vesc-project.com
vesc-project.com
VESC CALCULATORS
vesc-project.com
VESC DOCS
vesc-project.com
VESC Hardware
vesc-project.com
Eventually I will get the Stock Bafang Control Working with the Eggrider. I planned to use this VESC in the end so rather than wasting more time on the stock controller that I only want working for testing I am moving on to this. Don't worry I will finish the other thread.
Ok so VESC is a type of BLDC Controller that has OPEN SOURCE software meaning we can tune program modify each and every last function that the circuit is capable of.
With this power comes risk, remember that, this VESC can put out enough power to fry your motor in seconds and probably could fry your battery too if you don't have a BMS in your battery.
Most importantly start out with low AMP settings and everything at low power. Test it, monitor the motor temp the Vesc temp and the battery temp. As long as nothing is getting too hot increase the power a little at a time until things start to get hot. Don't let it overheat though. I wouldn't go over 100c to 120c. Once you find that power level where things are getting hotter than you want, back it off maybe 10%. Call that your max safe power. Everyone has a different setup so this will be different for everyone. So Just don't copy someone Elses settings. Things like the size and length of the phase wires changes things.
This is the VESC I bought.
https://tronicsystems.com/products/tronic-250r-bare-board-no-enclosure
The cable headers are 2mm JST Connectors.
So it's easy to make the wiring harness. I plan to take any 1T4 EB Bus Cable and put the JST Connectors on the end that connects to the motor.
Just have to cut the end off and attach the JST Connectors.
For a Display I am pretty sure the EggRider will work. There are settings for VESC Protocol in the EggRider.
But really you don't have to have a display with this if you don't need one.
The Board is Bluetooth so it connects to a app and shows more data than I have seen on any other display.
Check it out.
Mann I am excited !!
It's gonna take a little bit to get it all going but I can't wait.
YeeeeeeHawwwww
LINKS !!
VESC WEBSITE
VESC Project
VESC CALCULATORS
VESC Project
VESC DOCS
Documentation | VESC Project
VESC Hardware
VESC Project
Last edited: