Mike leroy
Active Member
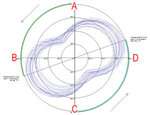
50% of your pedal stroke (i.e., one chainwheel revolution) has no effect or loses power! The power fades from the 5'oclock position. Power gain does not recover until the 2 o'clock position, which is 75% of the revolution on one foot. A significant power loss occurs in each pedal upstroke, according to the following videos.
The peanut-shaped watt curve shows power gain and loss in each pedal cycle. Maximum power is generated along the diagonal line connecting the left and right feet. The diagonal line represents the downstroke at 2 o'clock on each pedal.
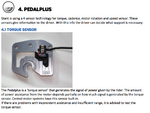
To maximize battery energy, only the complementary amount of motor power should be drawn to overcome the upstroke pedal loss. Complementary motor power maintains speed without straining the battery. Yamaha SyncDrive achieves smoother acceleration and battery consuming by adding a fourth sensor -- "motor rotation" -- and sophisticated controller software.
You could graph pedal power in relation to cadence in real-time with your cell phone accelerometer. Some systems seem to lack sensitive battery energy monitoring. The Yamaha SyncDrive seem to conserve twice the battery energy of less sophisticated motors.
You might also consider using a cellphone metronome to develop a smoother cadence, as the Yamaha SyncDrive achieves with the Sine Wave Controller. The difference between a Sine Wave and conventional controller is the electrical difference between stop-and-go and freeway traffic flow.
For a 60 RPM cadence, set the metronome to 120 beats per minute. Each beat corresponds to an upstroke. I use a metronome to train for uphill sprinting. I run up a 10% grade with the metronome set to 80-100 beats per second (~90 RPM). I know of no better way to improve uphill running speed.
I am rapidly coming to the conclusion that bottom bracket spindle torque sensors unnecessairly drive eBike cost up by $500-$1000. Over-engineering is great business for component manufacturers. An accelerometer, motor and/or gear sensors make more sense to me. Polaris eBikes feature gear sensors. Chris at lectricCycles.com told me an 8Fun gear sensor and controller will be available this year.
The Yamaha SyncDrive is the most sophisticated example. The SyncDrive has four sensors, rather than three. The additional sensor monitors the motor. The torque sensor is a less expensive pedal sensor, rather than bottom bracket spindle sensor.

The first picture and video illustrated the "sine wave" of your pedal stroke. The "motor rotation" sensor produces a "sine power wave". You do not need to understand the math to know that the two are on the same "wavelength". Older technology is literally fitting a round peg into a square hole.

Pedal power fluctuates; most power is generated from the 2 to 5 o'clock position (25% of your cadence). Your legs generate and lose power in cycles or RPMs. The analogy is jumping rope. You exert most energy when the rope is below your waist, as you push off the ground. When you land, you lose energy because you must absorb the impact.
Pedal stroke power loss is seriously increased on hills. The beauty of eBikes is compensating for uphill stroke power loss.
The difference between jumping rope and the pedal upstroke is the loss of power due to the pedal pushing your foot upwards. A common misconception is the foot pulls the pedal upwards during the upstroke.
My guess is the optimal Power Assist Level (PAL) is 25% to 75% of your leg power. The idea is to use the motor to make up for the gaps in the power stroke to provide a consistent level, rather than fluctuating power. Ideally, the motor only adds power in the valleys of your leg power stroke, but not so much as to increase peak power from the 2 to 5 o'clock position.
You should be able to feel the optimal, complementary power boost by paying attention to the power applied to your foot by the motor during the upstroke. By the same token, you should feel like the motor is neutral on the power downstroke.
The power fluctuations may also be audible. Attach something to the tire or spokes. Record the sound of your motor your cell phone and graph it. On a steep hill, the light level from a generator may visibly fluctuate.
You can physically demonstrate balanced power with the eBike on an indoor trainer. Simply have another person record the wattage output fom the eBike display. Computer access is also available. CycleAnalyst should provide adequate information. Plot your own polar graph, as in the WattBike video, with cell phone acceleramometer.
Tracking battery consumption will pinpoint the optimal tradeoffs. In this way, the eBike system functions more like a car transmission by providing appropriate power to a given situation. The goal is keep the motor between "lugging" and over-revving, like in a manually shifted car. The WattBike Polar Graph will resemble a sausage more than a peanut, as described in the above video.
I believe my theory was confirmed in this blog. Power levels were set to 10% increments and maximum assist is 63% of motor wattage.
The controller is monitoring 1000 times per second. Take full advantage of the cadence sensor. The motor provides most power at low cadence (i.e., 55 RPM) and shuts off around 80 RPM. For a 750W motor, each RPM is approximately a 25W drop in motor power, at 100% PAL. Assuming 10W per Nm of torque, one RPM drop in cadence is roughly 2Nm of torque. When these large power changes are not smoothed by software, the motor is jerked like a jackhammer.
Slowing down to speed up may sound ironic, but the twin human and motor powers are balanced in this fashion. Gradual, smooth cadence changes, rather than abrupt, standing-up sprints extract the greatest torque from your motor with least energy
How to tune 8Fun firmware parameters is unclear. Most people pedal around 60 RPM, which generates max motor power. Setting PALs in gradual 10% increments aligns optimal RPMs to cadences.
My intuitive guess is most PAL levels, i.e., over 100% of leg power, waste battery power. Configuring the nine PAL levels in the controller as smooth, subtle 10% increments, from 10% to 100%, can prove or disprove the theory. The evidence is most conspicuous on 10%, or higher grades.
The 8Fun BBS02 motor is the only system that I know of, that permits PAL customization.
When more than 100% of leg power is needed, use the throttle as a turbo charger. After finding the most appropriate PALs, the need for a throttle should disappear.
Battery powered car drivers have efficiency contests. The principle is coasting greatly improves gas mileage. I can improve my gas mileage by 30% by monitoring the car TPS (Throttle Position) from the computer diagnostics.
Can you provide some evidence that correlates PAL levels with pedal stroke?
The peanut-shaped watt curve shows power gain and loss in each pedal cycle. Maximum power is generated along the diagonal line connecting the left and right feet. The diagonal line represents the downstroke at 2 o'clock on each pedal.
(Link Removed - No Longer Exists)
WattBike Pedal Power Stoke in Watts
WattBike Pedal Power Stoke in Watts
To maximize battery energy, only the complementary amount of motor power should be drawn to overcome the upstroke pedal loss. Complementary motor power maintains speed without straining the battery. Yamaha SyncDrive achieves smoother acceleration and battery consuming by adding a fourth sensor -- "motor rotation" -- and sophisticated controller software.
You could graph pedal power in relation to cadence in real-time with your cell phone accelerometer. Some systems seem to lack sensitive battery energy monitoring. The Yamaha SyncDrive seem to conserve twice the battery energy of less sophisticated motors.
You might also consider using a cellphone metronome to develop a smoother cadence, as the Yamaha SyncDrive achieves with the Sine Wave Controller. The difference between a Sine Wave and conventional controller is the electrical difference between stop-and-go and freeway traffic flow.
For a 60 RPM cadence, set the metronome to 120 beats per minute. Each beat corresponds to an upstroke. I use a metronome to train for uphill sprinting. I run up a 10% grade with the metronome set to 80-100 beats per second (~90 RPM). I know of no better way to improve uphill running speed.
I am rapidly coming to the conclusion that bottom bracket spindle torque sensors unnecessairly drive eBike cost up by $500-$1000. Over-engineering is great business for component manufacturers. An accelerometer, motor and/or gear sensors make more sense to me. Polaris eBikes feature gear sensors. Chris at lectricCycles.com told me an 8Fun gear sensor and controller will be available this year.
The Yamaha SyncDrive is the most sophisticated example. The SyncDrive has four sensors, rather than three. The additional sensor monitors the motor. The torque sensor is a less expensive pedal sensor, rather than bottom bracket spindle sensor.
The first picture and video illustrated the "sine wave" of your pedal stroke. The "motor rotation" sensor produces a "sine power wave". You do not need to understand the math to know that the two are on the same "wavelength". Older technology is literally fitting a round peg into a square hole.
Pedal power fluctuates; most power is generated from the 2 to 5 o'clock position (25% of your cadence). Your legs generate and lose power in cycles or RPMs. The analogy is jumping rope. You exert most energy when the rope is below your waist, as you push off the ground. When you land, you lose energy because you must absorb the impact.
Pedal stroke power loss is seriously increased on hills. The beauty of eBikes is compensating for uphill stroke power loss.
The difference between jumping rope and the pedal upstroke is the loss of power due to the pedal pushing your foot upwards. A common misconception is the foot pulls the pedal upwards during the upstroke.
My guess is the optimal Power Assist Level (PAL) is 25% to 75% of your leg power. The idea is to use the motor to make up for the gaps in the power stroke to provide a consistent level, rather than fluctuating power. Ideally, the motor only adds power in the valleys of your leg power stroke, but not so much as to increase peak power from the 2 to 5 o'clock position.
You should be able to feel the optimal, complementary power boost by paying attention to the power applied to your foot by the motor during the upstroke. By the same token, you should feel like the motor is neutral on the power downstroke.
The power fluctuations may also be audible. Attach something to the tire or spokes. Record the sound of your motor your cell phone and graph it. On a steep hill, the light level from a generator may visibly fluctuate.
You can physically demonstrate balanced power with the eBike on an indoor trainer. Simply have another person record the wattage output fom the eBike display. Computer access is also available. CycleAnalyst should provide adequate information. Plot your own polar graph, as in the WattBike video, with cell phone acceleramometer.
Tracking battery consumption will pinpoint the optimal tradeoffs. In this way, the eBike system functions more like a car transmission by providing appropriate power to a given situation. The goal is keep the motor between "lugging" and over-revving, like in a manually shifted car. The WattBike Polar Graph will resemble a sausage more than a peanut, as described in the above video.
I believe my theory was confirmed in this blog. Power levels were set to 10% increments and maximum assist is 63% of motor wattage.
The controller is monitoring 1000 times per second. Take full advantage of the cadence sensor. The motor provides most power at low cadence (i.e., 55 RPM) and shuts off around 80 RPM. For a 750W motor, each RPM is approximately a 25W drop in motor power, at 100% PAL. Assuming 10W per Nm of torque, one RPM drop in cadence is roughly 2Nm of torque. When these large power changes are not smoothed by software, the motor is jerked like a jackhammer.
Slowing down to speed up may sound ironic, but the twin human and motor powers are balanced in this fashion. Gradual, smooth cadence changes, rather than abrupt, standing-up sprints extract the greatest torque from your motor with least energy
How to tune 8Fun firmware parameters is unclear. Most people pedal around 60 RPM, which generates max motor power. Setting PALs in gradual 10% increments aligns optimal RPMs to cadences.
My intuitive guess is most PAL levels, i.e., over 100% of leg power, waste battery power. Configuring the nine PAL levels in the controller as smooth, subtle 10% increments, from 10% to 100%, can prove or disprove the theory. The evidence is most conspicuous on 10%, or higher grades.
The 8Fun BBS02 motor is the only system that I know of, that permits PAL customization.
When more than 100% of leg power is needed, use the throttle as a turbo charger. After finding the most appropriate PALs, the need for a throttle should disappear.
Battery powered car drivers have efficiency contests. The principle is coasting greatly improves gas mileage. I can improve my gas mileage by 30% by monitoring the car TPS (Throttle Position) from the computer diagnostics.
Can you provide some evidence that correlates PAL levels with pedal stroke?
Attachments

Last edited:




")